
Rabah Attik
Prendre en main la carte CyberPi du Mbot2
Présentation de la carte Cyber Pi
Présentation de la carte Cyber Pi
Dans ce Tuto nous allons apprendre à programmer la carte CyberPi du mBot2 avec le logiciel Mblock 5
Cyber Pi est un microcontrôleur puissant et polyvalent destiné à l’enseignement. Il est utilisable dans plusieurs domaines tels que l’informatique, la robotique, la science des données et l’intelligence artificielle. Ainsi que d’autres domaines du programme d’étude.
Il possède des capteurs intégrés, un écran couleur et une capacité de communication en Wi-Fi qui lui permet de couvrir un large éventail de sujets d’étude.
Il possède des capteurs intégrés, un écran couleur et une capacité de communication en Wi-Fi qui lui permet de couvrir un large éventail de sujets d’étude.
Write your awesome label here.
Découverte de la carte CyberPi
Après le démarrage de la carte, on peut remarquer que certains programmes sont déjà préinstallés, cela inclut un programme d’enregistrement de la voix, des jeux vidéo, etc.
{kind=link}
{kind=link}
Dans la suite de ce tutoriel nous allons créer nos propre programmes grâce au logiciel Mblock v5 mBlock qui est un logiciel de programmation basé sur Scratch 3 puis on charge ces programmes sur la carte Cyber Pi.
Programmation de la carte CyberPi
Premièrement, avant de commencer à créer notre programme, il est nécessaire d’ajouter sur Mblock les extensions liées au mBot2 pour réaliser cela on clique sur le bouton : Extension
{kind=link}
Le mBot2 se déplace en suivant un marquage au sol (ligne noire). Pour assurer cette fonction, il dispose à l’avant d’un module suiveur de ligne. Tant que le capteur détecte la ligne, le robot avance. Lorsqu’un des capteurs ne détecte plus la ligne, le robot doit tourner sur lui-même pour se remettre dans l’axe et suivre la ligne.
Ensuite on ajoute les extensions qui nous intéressent pour notre cas : mBot2, Pocketshield, Ultrasonicsensor 2 et Quad RGB sensor
{kind=link}
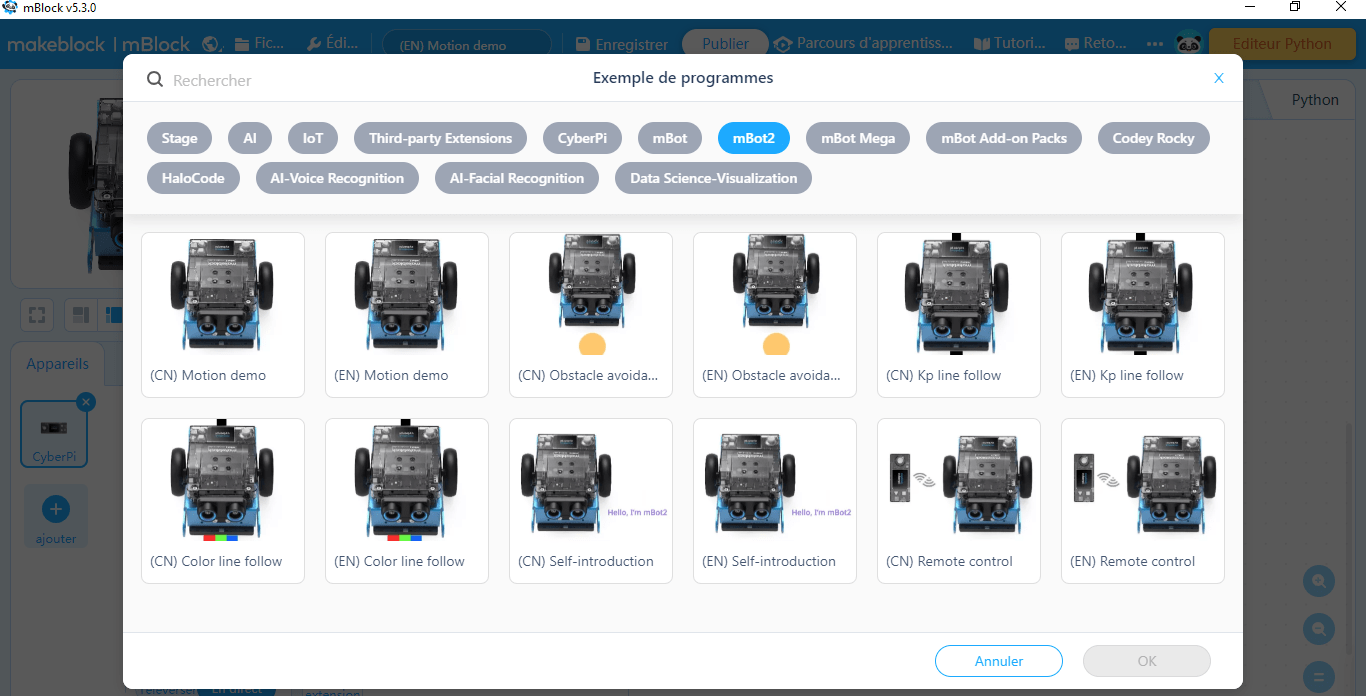
Pour les débutants il est conseillé de s’entraîner avec les programmes déjà existants
Pour cela, allez dans le menu Tutoriels, Exemple de programmes, cliquez sur mBot2 et choisissez les exemples qui vous intéressent. Ils sont disponibles en chinois (CN) ou en anglais (EN).
{kind=link}
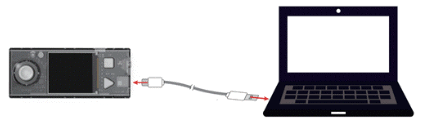
Après la réalisation du programme on doit le téléverser vers la carte Cyber Pi.
Tout d’abord on connecte la carte avec l’ordinateur via le câble USB type c.
{kind=link}
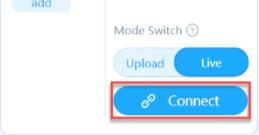
Ensuite on clique sur le button “connect” pour connecter CyberPi avec Mblock 5.
{kind=link}
Une fois votre CyberPi connecté, mBlock 5 affiche un message indiquant "Connected!"
{kind=link}
Maintenant vous pouvez choisir un mode d’exécution de programme : Live ou Upload. mBlock 5 fournit deux modes d’exécution de programme, en direct et en téléchargement.
En direct : pour déboguer le code en temps réel.
Téléchargement : pour charger le programme dans la carte et tester le programme même après déconnexion de la carte.
{kind=link}
3 démonstrations avec la carte CyberPi
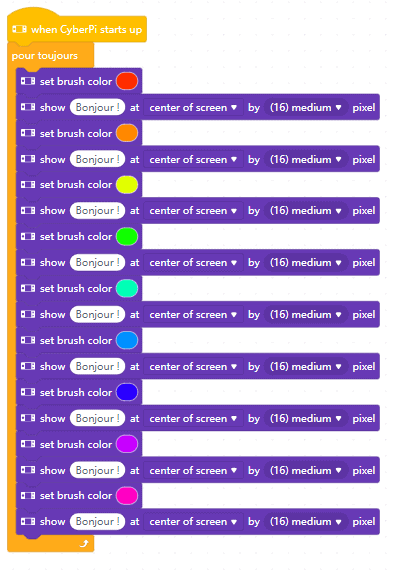
Démo I
Dans cette première démo nous allons travailler exclusivement avec la carte (sans le robot) et affiché sur l’écran « Bonjour » en multi couleur.
Code Mblock 5
{kind=link}
Démo vidéo
Démo II
Ce programme de démonstration offre à l’utilisateur la possibilité de déplacer le mBot grâce au joystick.
A la fin du dit déplacement, le robot joue un son à caractère humoristique puis affiche un message correspondant à l’action choisie et allume les leds avec une couleur choisi.
A la fin du dit déplacement, le robot joue un son à caractère humoristique puis affiche un message correspondant à l’action choisie et allume les leds avec une couleur choisi.
Code Mblock 5
{kind=link}
{kind=link}
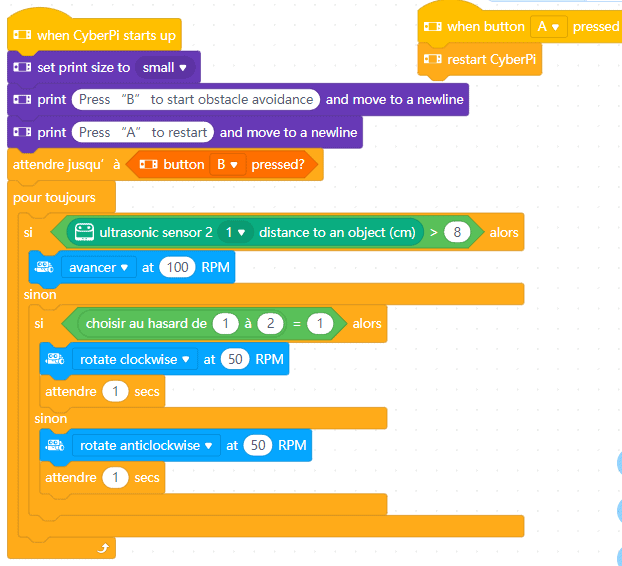
Démo III
Dans cette démo on va programmer le mBot pour qu’il évite et détecte les obstacles grâce au capteur Ultrason.
Code Mblock 5
{kind=link}
Démo vidéo
Connaissez-vous notre plateforme pédagogique ?
Essayer gratuitement pendant 7 jours pour profiter d'un accès illimité à la plateforme !
Découvrir la plateforme Evolukid


Evolukid est une plateforme pédagogique en ligne pour les enfants, les adolescents et leurs parents. En souscrivant à la plateforme Evolukid, vous recevez en illimité à l'ensemble des parcours pédagogiques pendant toute la durée de votre abonnement.
Informations Légales
Évolukid
Découvrez nos parcours pédagogiques